算法对其来控制。根据结果得出,其打印速度最快达到90 mm/s,打印精度±0.2 mm,设备整体尺寸仅为200 mm×200 mm×200 mm,能作为桌面式教学设备,而且简单易操作,造价成本较低,具有非常好的推广应用价值。
自2008年起,桌面式3D打印机进入了快速的提升的阶段,这主要是因为reprap的开源技术获得了极大的推广应用,由此产生了多个制造桌面3D打印机的有名的公司(如Makebot、Ultimaker等)[1]。经过一直在改进,在开源3D打印机的基础上逐渐出现了SLS、SLA、DLP、3DP等多种打印技术,对制造业的进步发展产生了重大意义。而3D打印机的结构也出现了门架体系结构、双光轴结构、并联式结构等多种形式,其中并联式具有结构相对比较简单、物理运动反应速度快等优势,因而推广应用价值较大。
然而,并联式3D打印机算法复杂,装配要求和加工要求也比较高。目前,FDM(熔融沉积成型)类型的3D打印机已经开发到第3代了,但所制造设备一直受限于笛卡儿坐标系,没有进一步突破原有的结构,打印速度和打印精度遇到了瓶颈[2]。由于并联式结构具有快速、定位精度高等优点,其打印速度比普通坐标系打印机要快,因此有必要对并联式3D打印机进行研究。查阅有关的资料可知[3],并联式结构的运动能够最终靠换算,转化成笛卡儿坐标系的运动,最终用于设计并联式3D打印机。
3D打印机主要工作原理是通过电脑的切片软件将三维模型按照设置的层厚切成一层一层,再根据切片算法,把面化成线的填充,再转化为G代码。3D打印机控制系统软件通过串口通信的方式,把数据传送到3D打印机的主控板,主控板上的固件主要由G代码解释器组成,G代码解释器把数据流解释为3个驱动喷头运动的步进电机和1个挤料电机的运动,通过A4988驱动步进电机的运动[4]。同时,它的温控系统用了PID闭环控制,可以把温度稳定地控制在某个值,来保证塑料的熔化,使喷头能够均匀出丝。
主体由阳极氧化的铝板和4040铝型材组成,基座执行器主要由CSK直线步进电机组成,末端执行器主要由赛钢材质加工而成的平台、万向关节、斜杆组合而成。
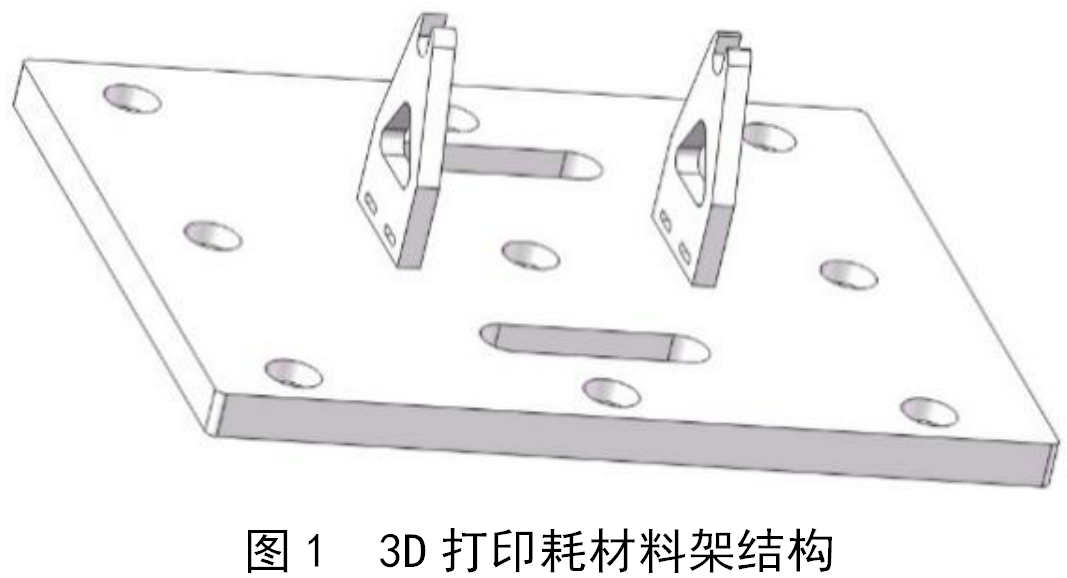
传统打印机的耗材料架一般都会采用三种方式设计。第一种是脱离3D打印机本体的结构,这种结构虽然轻便,但在使用上并不方便,在3D打印的过程中,偶尔料架会被带动偏移,导致打印失败。第二种是采用内藏式的结构,为了在外形上容纳耗材料架,3D打印机机身体积会促进增大,为使体积尽可能缩小,一般会把存放耗材的空间做得很小,这种设计并不利于长时间打印。第三种是顶置式,顶置式对耗材的存放空间没有限制,因此,设计一套不需要完全拆卸的顶置式料架,如图1所示,料架两侧板根部用合页与顶板连接。当需要上料的时候,把两侧板立起来,再放上一根支撑横梁即可。当需要运输拆卸时只需把横梁提起来,两侧板往外折摊平即可。
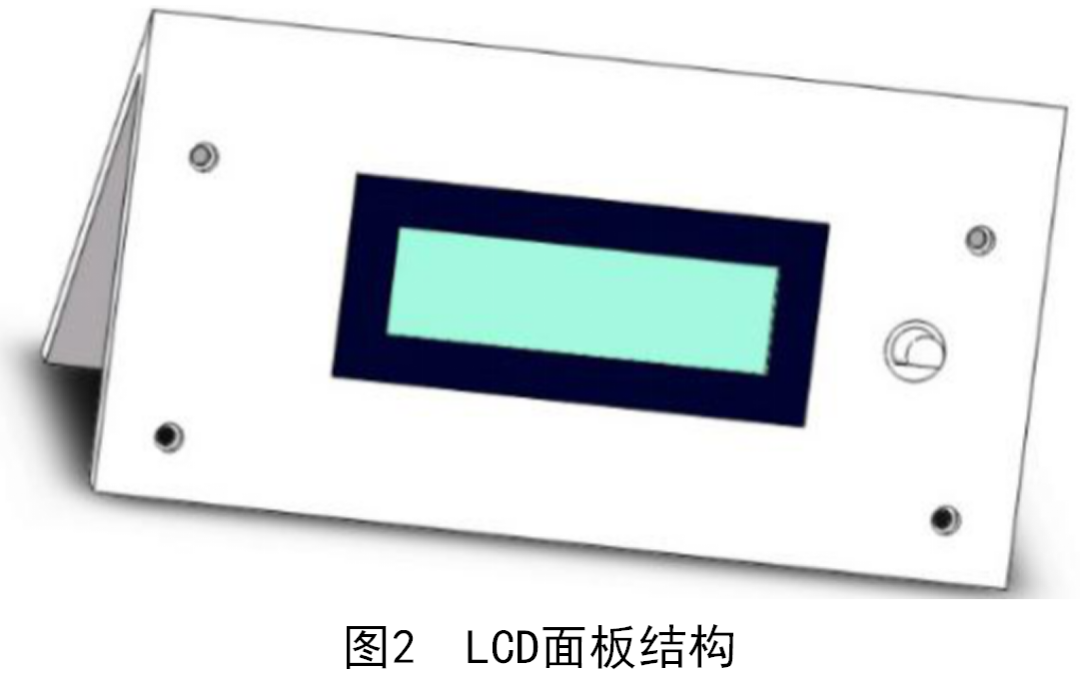
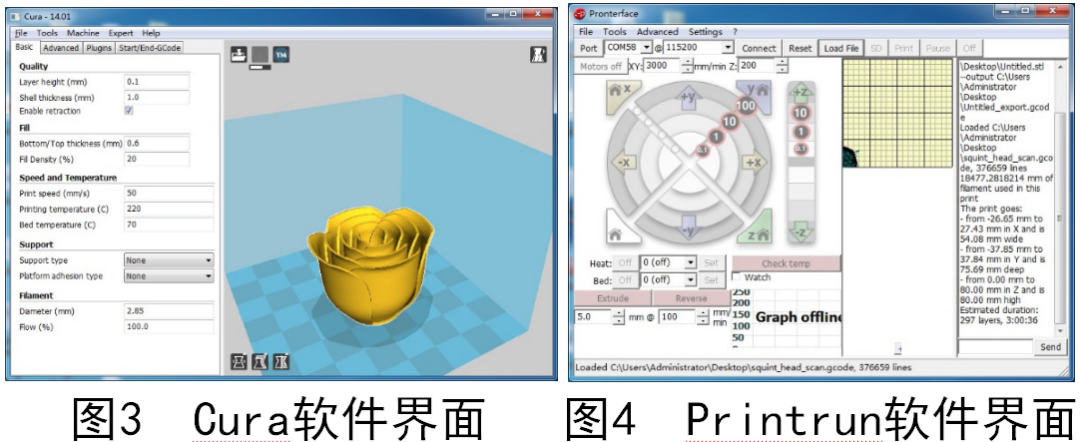
电控部分主要由Mega2560、J-head加热喷头、热敏电阻Ramp1.4、A4988、MK2PCB热床、限位开关等部件组成。桌面式3D打印机的优势体现在其简单易用,开源社区里发布了很多优秀的3D打印控制软件,其中有Cura和Printrun[5]。Cura的界面如图3所示,优点是图形化界面,简单易用。Printrun的界面如图4所示,优点是能控制多种3D打印机,功能选项较多。并联式3D打印机由于其结构的特殊性,它的打印起始点与普通打印机不同,另外它的打印范围是一个圆,有别于普通打印的正方形,因此选择了设置参数比较多的Printrun。
并联式结构特殊,它与普通直联式不一样,并不是通过三维坐标xyz的三个参数来直接对应控制三个轴的步进电机所走的参数。并联式结构所用的坐标系不是笛卡儿坐标系,它的三维坐标点有必要进行一个换算,映射到端点坐标中,然后根据端点坐标来推算3个轴步进电机的运动参数[6]。
如图5所示,将并联式结构可以进行模型简化。因为FDM熔融沉积打印技术是通过熔化的塑料层层堆积,因此,要使打印平台工作时提升1 mm(两斜杆为刚性材料,忽略其形变),A点和B点同时往上提升1mm即可,而A点和B点的上升运动则通过其对应的两个步进电机的转动进行转化。
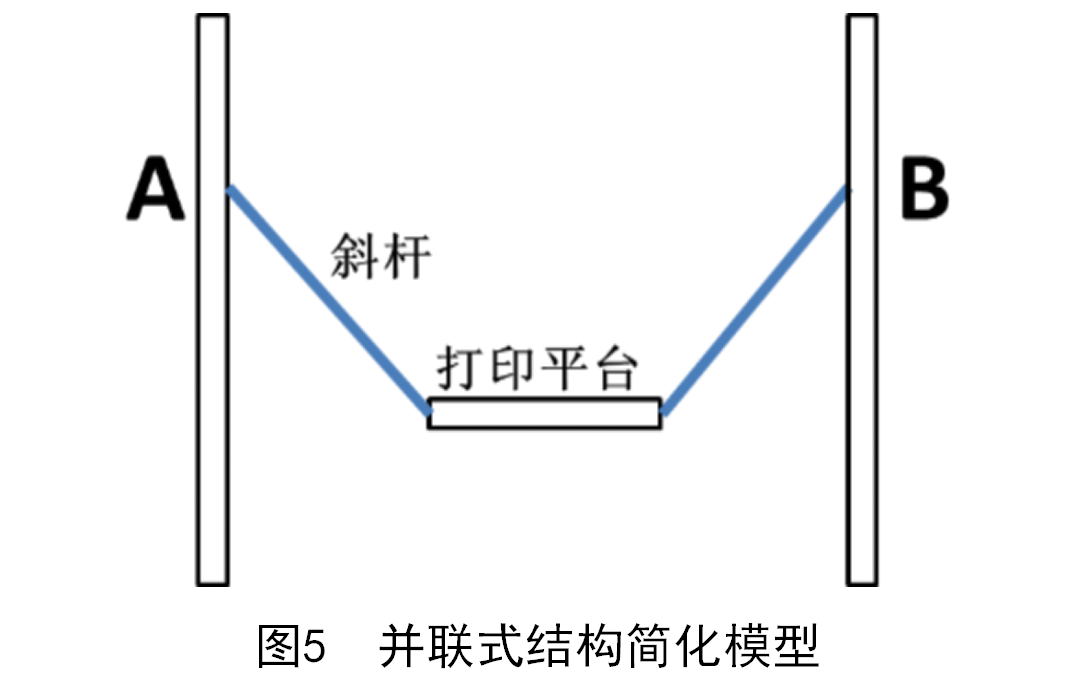
设两斜杆长度都为5,平台长度为2,初始位置,斜杆与水平面所成夹角为45°,因此A点和B点与水平面距离都为
同理,在三维坐标中,G代码给出的是喷头喷嘴的坐标,因此就需要把喷嘴坐标转换为3个基座执行器的坐标。
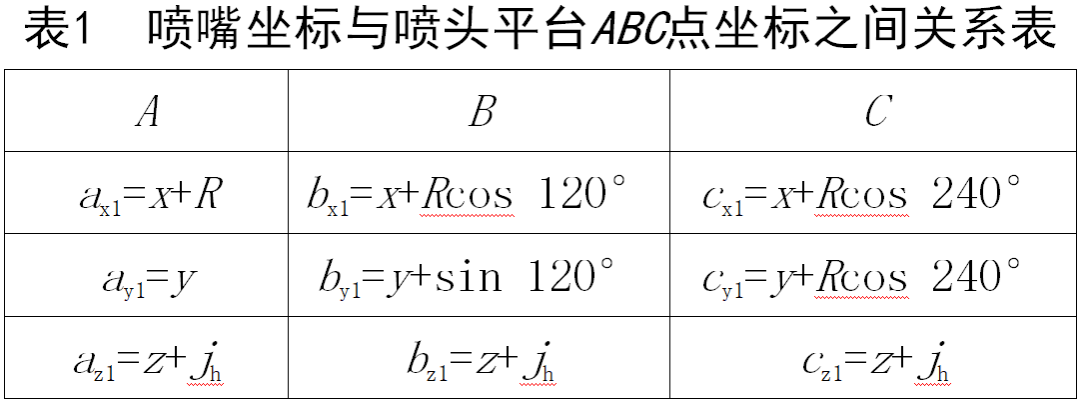
设喷嘴坐标为(x,y,z),喷头平台三点坐标A(ax1,ay1,az1),B(bx1,by1,bz1),C(cx1,cy1,cz1)。根据三角函数关系,易得出喷嘴坐标与喷头平台A、B、C点坐标之间的关系,jh为打印喷头高度,R为喷头平台外接圆半径,关系如表1所示。
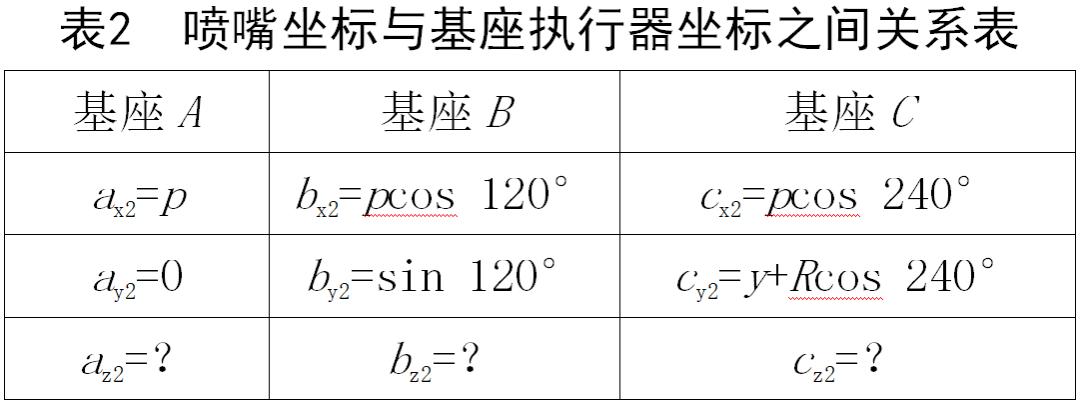
同理,对于基座执行器,设喷头基座执行器三点坐标,基座A(ax2,ay2,az2),基座B(bx2,by2,bz2),基座C(cx2,cy2,cz2),同时得出喷嘴坐标与基座执行器坐标之间的关系,如表2所示。
因此,设la、lb、lc为x、y、z三个轴到打印平台万向轴的水平距离,可得:
该设备所用的步进电机步距角为1.8°,所以步进电机旋转一圈:360°/1.8°=200步(0.9°步距角的电机为400)。在没用细分驱动器的情况下,需要给步进电机200个脉冲,电机才会旋转一周。在电控部分中,该设备是采用A4988电机驱动器,利用其最高的细分数——16细分,因此使用细分驱动器的情况下,转一圈需要的脉冲:200×16=3 200。

并联式3D打印机上三个步进电机的运动方式是相同的,所以不难得出,另外两轴的步进电机驱动参数也是相等的[7],同时设备上挤出机的步进电机也用了同样的电机驱动板,电机细分数也为16。因为挤出机的细分直接决定模型表面打印质量,所以要精细控制其挤出量。挤出机采用了远程供料结构,所以一定要使用齿轮减速,以克服3D打印耗材和导料管间的摩擦力。在齿轮减速机构中,该设备是采用了行星轮减速机构,减速比为5.18,挤出轮齿轮直径为12 mm。所以,挤出轮使耗材每走1 mm所需脉冲根据下式计算:

由于实际运动和计算存在一定的误差,因此调试设备时,可以打印一个长方体,根据其长宽高的实际长度和模型设计长度之间的比例关系,重新映射到X、Y、Z三轴每毫米的脉冲。因此对应更改Marlin固件的参数配置,更改如下:
本文介绍了并联式3D打印机的设计与计算,包括该设备的机械结构、电控部分和上位机软件。通过SolidWorks三维建模软件模拟分析,采用运动算法计算,采用步进电机算法对其来控制,采用Printrun 3D打印控制软件,最终设计并制造出并联式3D打印机。经过后期测试验证,其打印速度最快达到90 mm/s,打印精度±0.2 mm。设备整体尺寸仅为200 mm×200 mm×200 mm,能作为桌面式教学设备,而且简单易操作,造价成本较低,具有非常好的推广应用价值。